三菱PLC伺服實例程序分析應用
文章分享:三菱PLC伺服實例程序分析應用。
1.原點回歸程序示例:

M1250 原點回歸啟動按鍵 Y50 定位啟動 (私服參數) Y44 軸停止 (私服參數)
Y40 PLC準備完成 (私服參數)
M1081 電機手動狀態
M6401 原點回歸啟動條件輸出脈沖
[T0 H4 K1500 K9001 K1] 原點回歸專用指令
T0 Plc>》》QD75
H4 QD75模塊的首地址分配位置 40 K1500 定位指令 (私服參數) K9001 機械原點回歸
K1 設定值
SET Y50 執行電機的輸出,需要進行職位處理
2.原點回歸(進行中到完成)程序示例:

Y50 原點回歸動作進行中(私服電機的定位啟動輸出)
X50 啟動完成信號(私服參數)
X4C 電機BUSY(忙軸)電機動作中處于忙軸中X4C接通
M6501 原點回歸動作完成輸出(采用維持處理,一直接通)
斷開條件:
M6701 電機發生SERVO ERROR
X48 接通(私服內部參數,報警輸出)
YA42 私服電機的M/C電源斷開
[ RST Y50] 當電機完成原點回歸后,直接對電機進行復位
M1251 原點回歸動作進行狀態指示燈 當原點回歸正在進行中時以間隔0.5S的時間閃爍 原點回歸完成后一直接通
3.全部原點回歸程序示例:

M1290 原點回歸的啟動開關
M1001 原點回歸時必須在手動狀態下進行
M100 原點回歸的輸出 (動作需要進行維持處理)
原點回歸的斷開條件:
M101 全部原點回歸執行完成
M1012 復位按鍵啟動
M105 緊急停止開關啟動
4.JOG SPEED的更改和專用指令寫法:
M1055 M1053 M1051 是速度選擇的幾個按鍵開關,可以通過TOUCH直接進 行設定選擇 
SM400一直處于接通狀態,表示JOG的速度選擇可以通過開關的任意時間進 行設定寫入從而改變。
D120 是速度值存儲的字地址
DMOV 傳送指令,D 32數據傳送指令 (速度的值是任意設定的)
[ DTO H4 K1518 D120 K1 ] JOG速度專用指令寫入方法
6.SERVO ERROR的復位專用指令和寫法

伺服ERROR故障復位專用指令和寫法
![]()
K1502 K1602 K1702 K1802 是對各個軸出錯復位的專用代碼
當軸發生出錯時,相對應得軸會自動接通出錯信號,依次是軸一 x48
軸二X49 軸三x4a 軸四X4B
當故障解決后,需要對QD75的報警進行復位處理,需要在程序中編寫一個 復位開關,當開關接通后,執行私服復位的專用指令,將故障消除。
7.SERVO 電機運行的當前數據讀取專用指令和寫法

伺服電機當前數據讀取的專用指令和寫法
DFRO 是 DFROM的簡寫模式 32位數據的讀取,當前數據可能大于16位
K800 K900 K1000 K1100 分別是軸一到軸四的伺服電機當前數據讀取的 專用代碼
D6400 D6404 D6402 D6406 是數據讀取都得存儲地址
5.SERVO ERROR的讀取專用指令和寫法
![]()
私服內部專用指令(故障讀取)

PLC CPU 從 QD75中將故障的信息讀取出來 用 FROM
將讀取的故障信息數據存儲在D6700l里
8.SERVO 電機內部I/O信息數據讀取專用指令和寫法


9.SERVO 定位輸出專用指令和寫法(經典)

10.伺服電機加速時間和減速時間的程序設定方法:
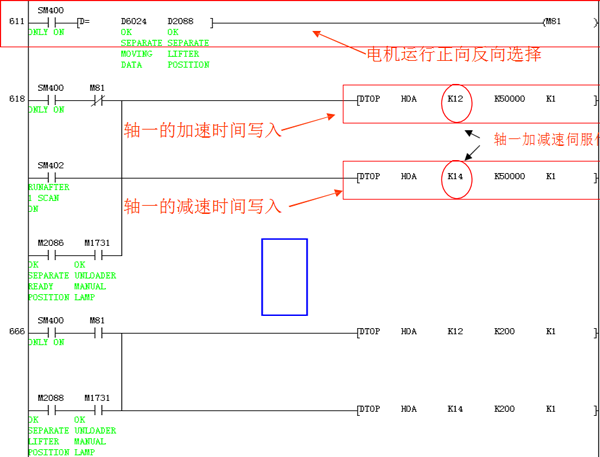
通過M81的接通和斷開,來選擇電機在正向運行時的加減速,如果只通過 對伺服參數的直接設定,那么電機的正向運行和反向運行時的加減速一樣。

11.伺服電機在運行中的速度改變程序寫法示例1:



11.伺服電機在運行中的速度改變程序寫法示例2:

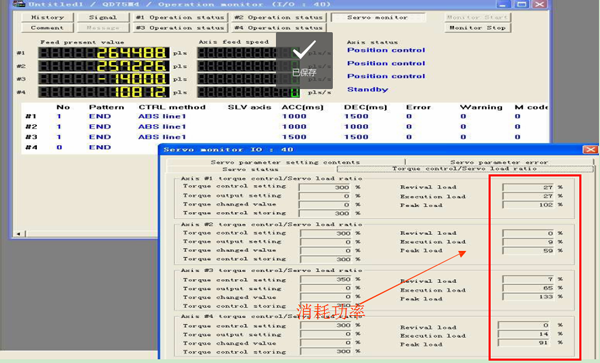
12.PLC怎樣讀取伺服電機的功率消耗數據,程序寫法:
讀取的數據存儲地址


深圳市海藍機電設備有限公司(www.dz129.cn)專業經營:三菱PLC、三菱伺服電機、三菱變頻器、三菱觸摸屏等工控自動化產品的批發和代理。同時提供機器人視覺、自動化開發、上位機軟件、機電設備維修等技術服務。
電話:0755-88356296(10線) 吳經理:13823726967







評論信息